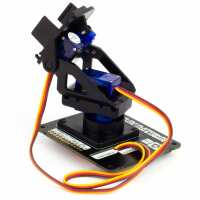
“This one is a lot of fun to play. Also painless setup. Just make sure you have a proper power supply, as these two motors eat a lof of current. Otherwise the RPI will hange when trying to rotate them.”
“For me, the pi has the camera the wrong way round! I use LAN cables and if you want the camera to face out the window, it needs to be the other end away from the LAN port!
I use an open case, with simple plastic top and bottom, I first stood this on double standoff stilts. Then I mounted the pan-tilt hat on standoffs, the wrong way round for GPIO. I don't use the GPIO plug on the hat. Using 5 wires, I connected the I2C :- SDA, SCL, 3v, 5v and GND from the convenient PADS on the other side of the HAT, connected directly down to the GPIO. The motion unit sits on more standoffs above the HAT. Lots of cool airflow. I don't use the slots for the servo leads, those now swing nicely away from any snagging. A 12" camera cable runs back and up to the upside down camera. The example web controller works fine, you just need to swap the directions for the buttons. Currently I use the simple web app example from the picamera docs, just need to hflip and vflip. I also added a heat shield made from Meccano plate to stop the sun on the Pi....”